Certificación de Parámetros Técnicos de Piso Industrial para Sistema Automatizado de HAI ROBOTICS® en Brasil
15 diciembre 2025
 CoGri-GesPaP continúa impulsando la transformación logística en Sudamérica, esta vez con su participación clave en la certificación de pisos industriales para un moderno sistema HAI ROBOTICS instalado en un centro de distribución en Viana, Brasil en Enero de 2025 para una importante empresa farmacéutica de la región.
CoGri-GesPaP continúa impulsando la transformación logística en Sudamérica, esta vez con su participación clave en la certificación de pisos industriales para un moderno sistema HAI ROBOTICS instalado en un centro de distribución en Viana, Brasil en Enero de 2025 para una importante empresa farmacéutica de la región.
¿Qué es el sistema utilizado por HAI Robotics?
El sistema de automatización de bodegas de HAI Robotics es una solución integral basada en robótica avanzada, conocida principalmente por su familia de sistemas HaiPick, que son Sistemas Automatizados modulares y flexibles.
Se especializa en tecnologías de “goods-to-person” (bienes a la persona o G2P), que utilizan robots autónomos para transportar contenedores, cajas o palés directamente a las estaciones de trabajo de los operadores, eliminando la necesidad de que el personal camine por los pasillos de la bodega.
Los AMR (Autonomous Mobile Robots) y ACR (Autonomous Case-handling Robots) de HAI Robotics están diseñados para el manejo eficiente de materiales en entornos logísticos dinámicos, combinando flexibilidad y densidad de almacenamiento. Los AMR, como los Autonomous Case-handling Mobile Robots (ACR) de la serie A42, navegan de forma autónoma usando sensores y mapeo en tiempo real para evitar obstáculos y optimizar rutas, permitiendo el transporte simultáneo de hasta múltiples cajas a alturas elevadas.

Su propósito principal es acelerar procesos de almacenamiento, recuperación, picking y fulfillment de pedidos, reduciendo costos laborales y errores manuales. Por su parte, los AGV se centran en tareas repetitivas y predecibles, siguiendo rutas fijas guiadas por marcas o láseres para mover cargas pesadas entre zonas de producción o envío.
Requisitos del Piso Industrial
El sistema HAI Robotics requiere de una cantidad importante de parámetros técnicos del piso que deben certificarse para lograr un estándar de operación óptimo. Estos parámetros técnicos se describen en el documento oficial “HAIPICK General Technical Document – Requirements for Floor and Environment V2.1”, que fue actualizado durante el 2024 y nos permite comprender de mejor manera cómo y por que se deben realizar las evaluaciones técnicas del piso.
CoGri-GesPaP participó activamente en la verificación de distintos parámetros técnicos, que se describen a continuación y representan solo algunos de los requerimientos que se deben evaluar:
Verificación de Planicidad en Pasillos
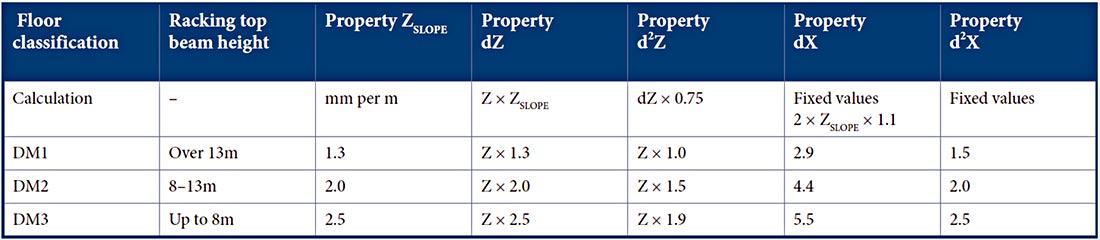
Los robots HAIPICK están programados para seguir rutas y direcciones definidas, ya sea que se desplacen por pasillos o espacios públicos. Las zonas de operación de estos robots deben cumplir con los requisitos de movimiento definidos (DM) , que se refieren a las definiciones de la 4.ª edición del TR34 de la Sociedad del Concreto del Reino Unido y son similares a los métodos adoptados en la norma F-min del ACI.
Según las normas de suelo de HAI, los límites que se indican en la Tabla 1 se aplicarán al suelo dentro de los pasillos, con cierto ajuste según las tolerancias específicas de HAI.
Donde:
- Propiedad dZ: Diferencia de elevación en mm entre los centros de las ruedas motrices del robot. Si se desconoce la distancia entre las ruedas motrices del robot, se puede usar 750 mm como valor predeterminado para el levantamiento (Z).
- Propiedad d2Z: Cambio de dZ en mm durante un movimiento de avance de 300 mm a lo largo de las huellas de las ruedas.
- Propiedad dX: Diferencia de elevación entre el centro del eje delantero y el centro del eje trasero. Esta dimensión es una constante de 1,5 m (X).
- Propiedad d2X: Cambio de dX en mm durante un movimiento de avance de 300 mm a lo largo de las huellas de las ruedas.
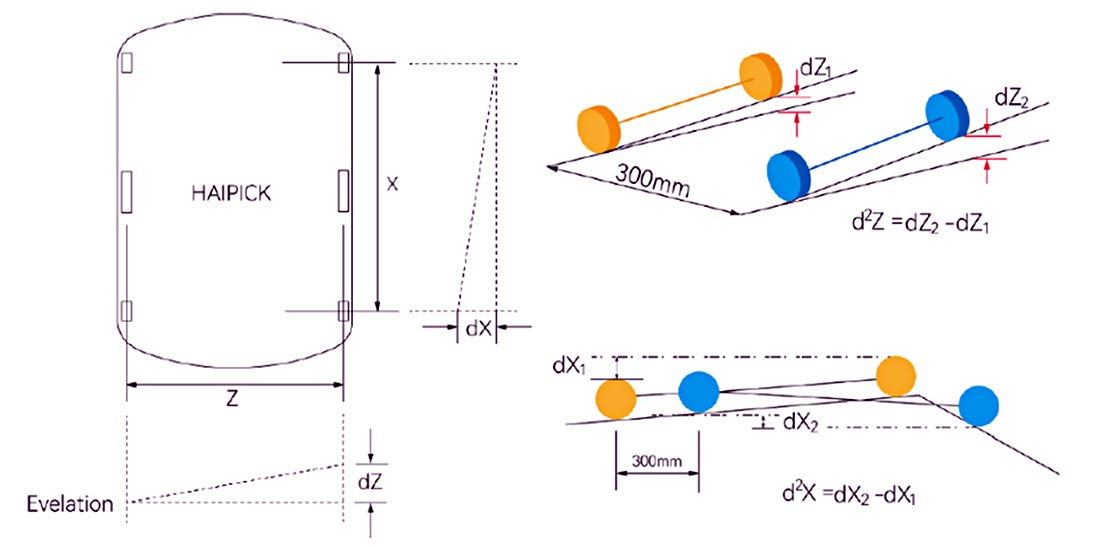
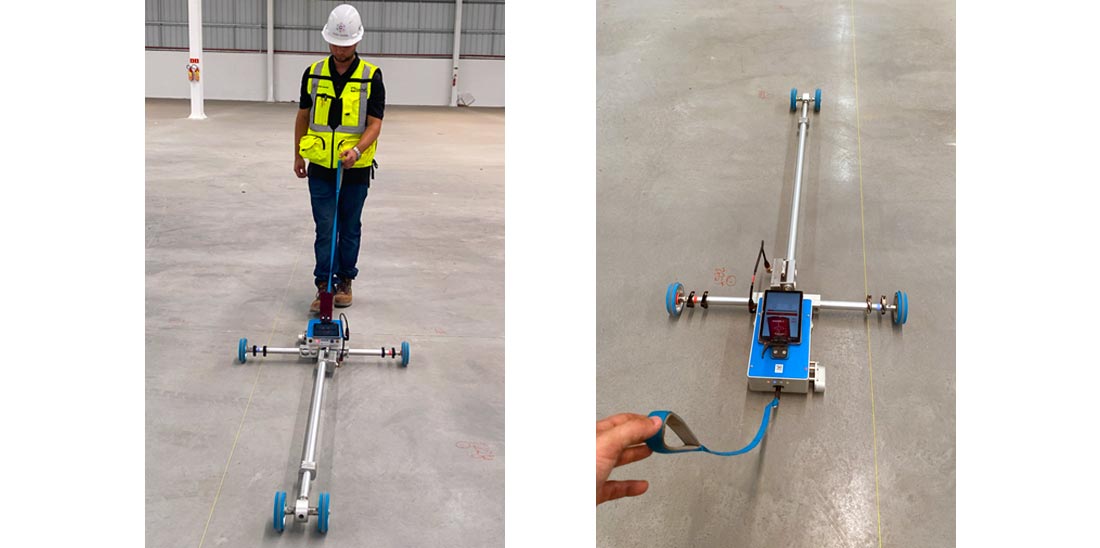
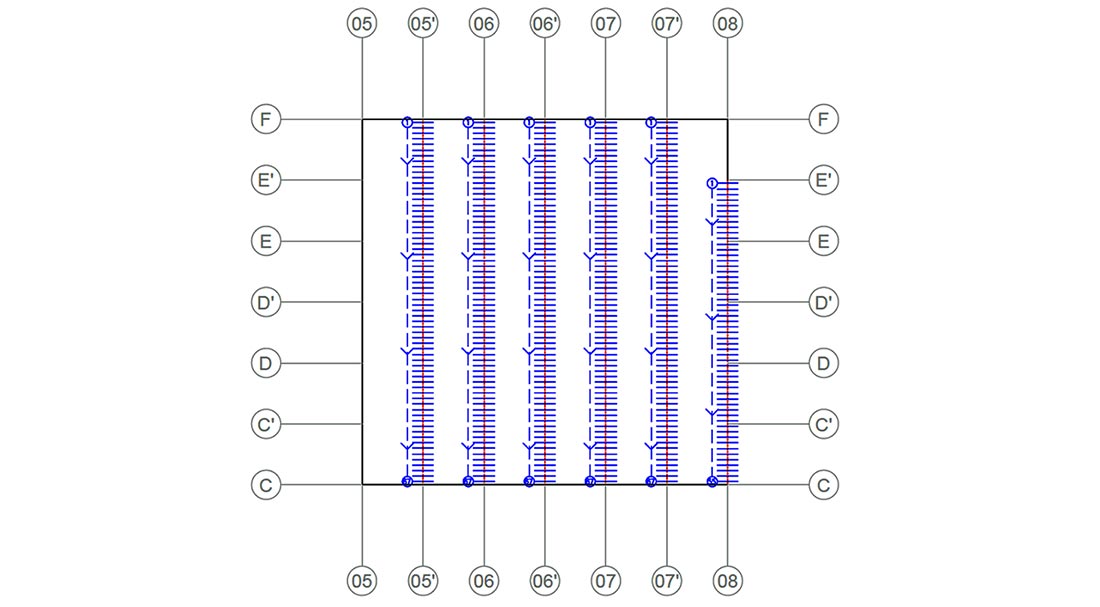
El estudio de planicidad se realizó según el esquema de medición mostrado en la Figura 2 utilizando nuestro perfilógrafo AIO (All-in-one) que nos permite realizar un levantamiento técnico de planicidades de múltiples normativas de planicidad de VNA’s (Pasillos muy angostos).

Verificación de Planicidad en áreas de Tránsito Aleatorio
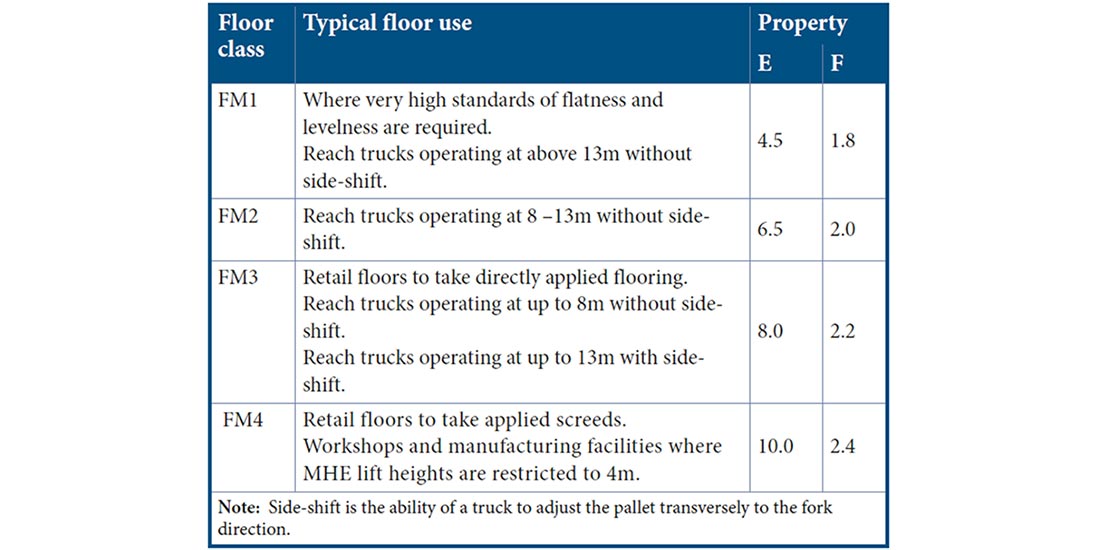
Para toda la superficie del suelo, incluidas las zonas bajo las estanterías y las zonas de libre circulación, se deben cumplir los siguientes requisitos adicionales. Estos requisitos son adecuados para las zonas donde operará el K50H.
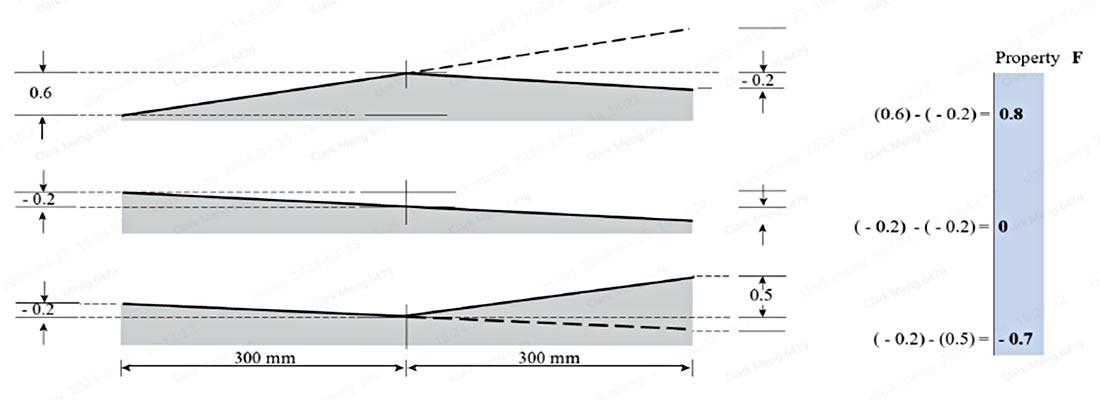
La siguiente tabla enumera las tres propiedades que se deben medir según TR34 y FM2.
Donde:
- Propiedad E: Diferencia de elevación en mm de puntos adyacentes separados a 3 metros de distancia.
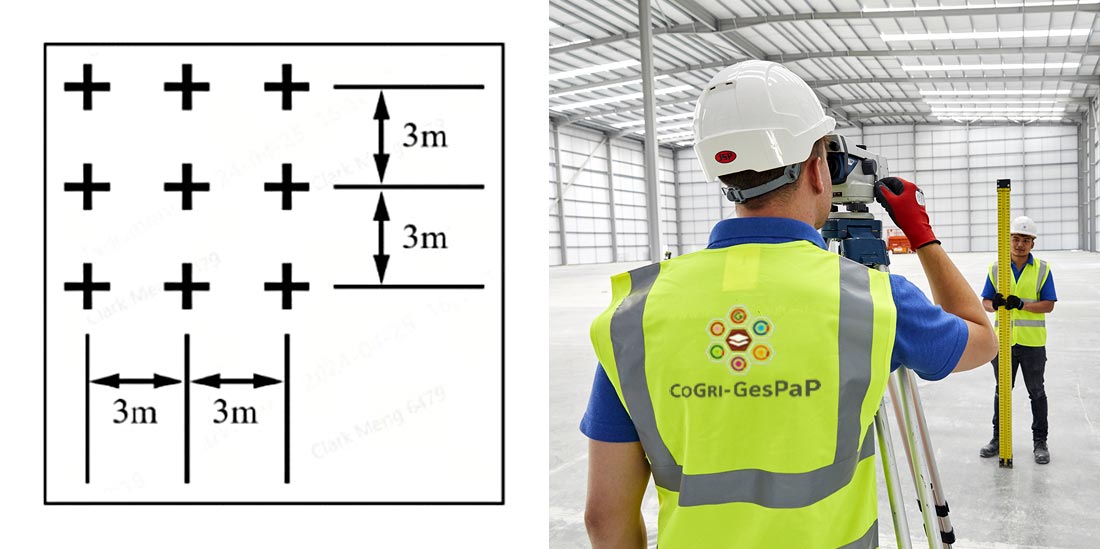
- Propiedad F: Cambio en la diferencia de elevación entre dos mediciones consecutivas de diferencia de elevación en un recorrido de 300 mm.
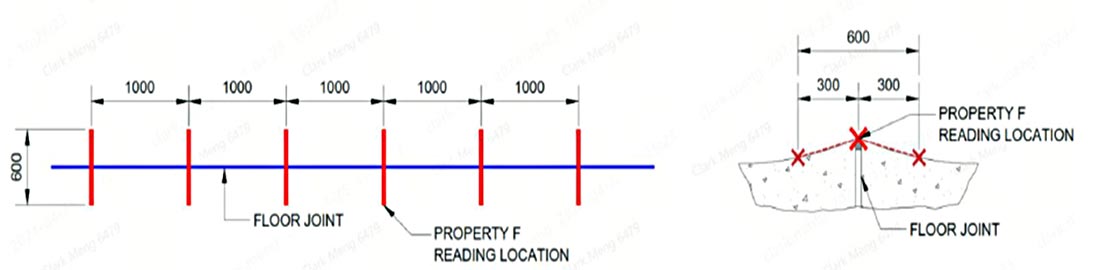
- Propiedad F sobre juntas: Verificar propiedad F a lo largo de todas las juntas de construcción.
- Datum: Se verifica mediante el levantamiento realizado de Propiedad E que la elevación de la losa se encuentra dentro de un rango de ±15mm.
El levantamiento de niveles fue realizado previamente por el cliente. CoGri-GesPaP participó revisando y verificando el procedimiento realizado y validando que los resultados obtenidos están dentro de las tolerancias exigidas por HAI Robotics.
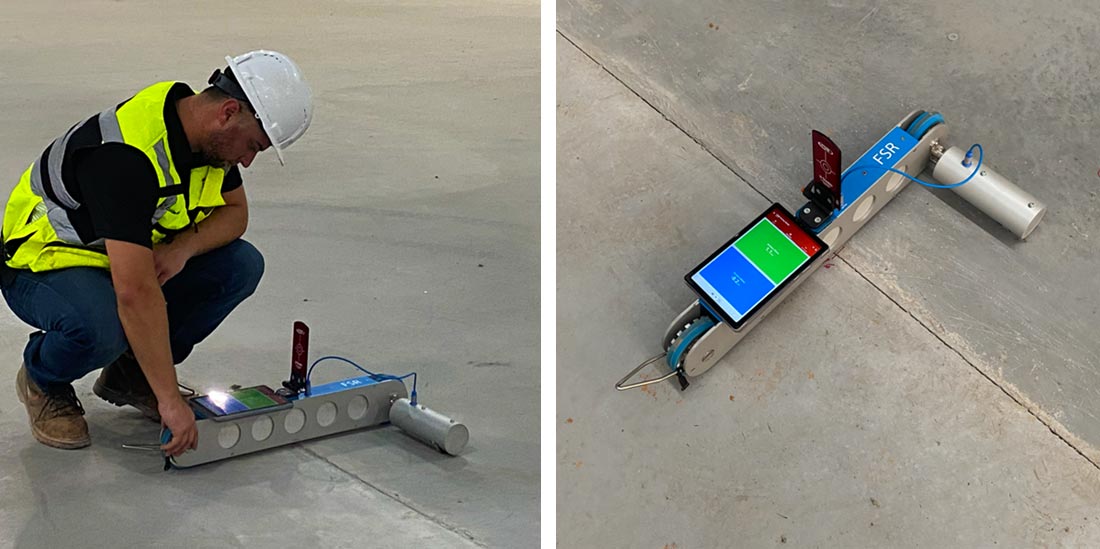
El levantamiento de Propiedad F sobre las juntas de construcción se realizó con equipo CoGri F-Speed Reader, que nos permite obtener lecturas en estático de la desviación de la junta, adquiriendo datos cada 1 metro, según se muestra en la Figura 6.
Medición de Coeficiente de Fricción Dinámico (DCOF)
El COF dinámico del suelo debe encontrarse sobre el rango establecido por HAI Robotics y estar libre de agua, suciedad grasosa, grava u otras sustancias que puedan reducirlo. De lo contrario, la distancia de frenado y la precisión de posicionamiento no cumplirán con los requisitos del proyecto, lo que provocará colisiones o problemas de conducción.
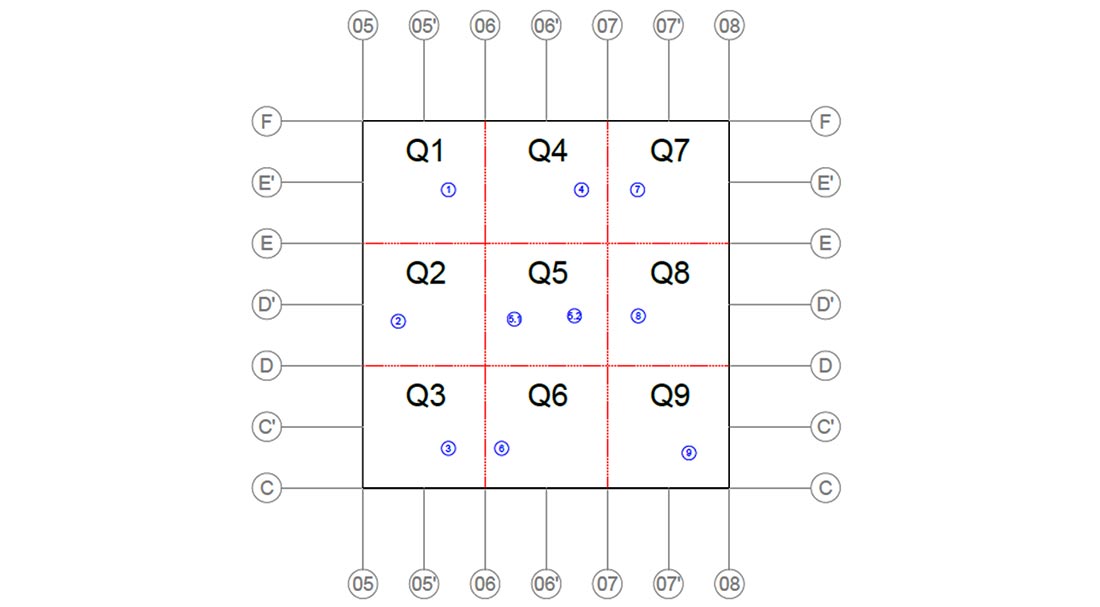
Las mediciones se realizaron según el esquema que se muestra en la figura 9, donde se llevaron a cabo 10 áreas de estudio, realizando 5 mediciones del coeficiente de fricción dinámico, obteniendo el promedio de estos para representar el valor de DCOF de un área específica. Para finalizar se concluye sobre el valor de DCOF de la superficie completa de estudio ponderando los resultados obtenidos de cada área de estudio.

Medición de Resistencia a la Abrasión
El piso debe cumplir cualquiera de los siguientes requisitos de resistencia a la abrasión:
- Dureza de Mohs: La dureza de Mohs del suelo debe estar entre rangos establecidos por HAI Robotics. El suelo debe soportar el desgaste de las ruedas del robot durante un uso prolongado y no debe generar polvo ni descascarillarse.
- BCA- AR2: La norma EN 13892-4 describe una prueba para medir la resistencia a la abrasión de una superficie de suelo. El límite máximo de abrasión debe cumplir con la clasificación es AR2.
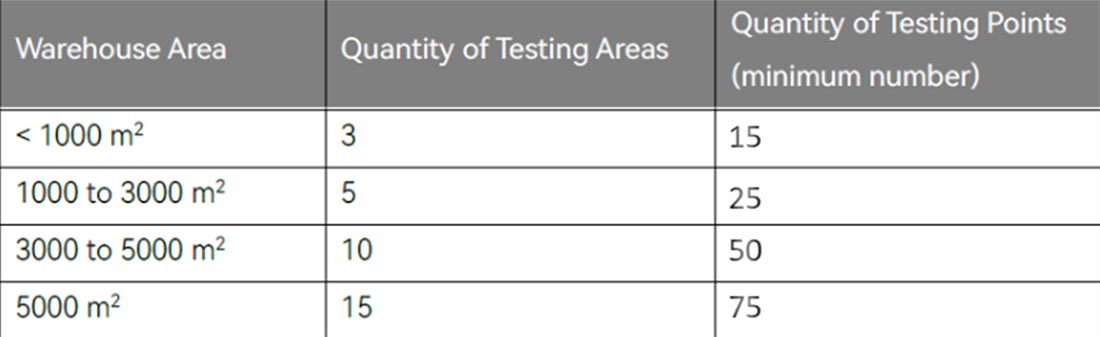
Para este proyecto se realizó la verificación de abrasión mediante Dureza de Mohs. La cantidad de muestras se determina según la Tabla 4. Cantidad de muestras de medición de dureza Mohs
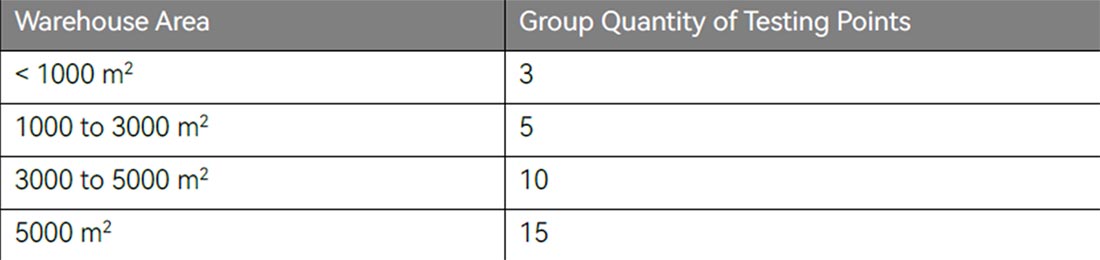
De acuerdo a la superficie de estudio se determina la cantidad de muestras de medición de dureza. Para el caso de este proyecto se realizaron 10 mediciones de dureza, y el resultado de la superficie completa se obtuvo mediante el promedio de todas las muestras. La ubicación de las muestras se ilustran en la Figura 10.


Las propiedades que se midieron durante este proyecto solo abracan algunas de las propiedades más relevantes que se desconocía sobre su condición. Dentro de las demás propiedades que se deben verificar del piso se encuentran:
- Resistencia del piso.
- Pendiente máxima.
- Escalones máximos.
- Ancho de jutas permisibles.
- Capacidad de carga del piso.
- Espesor de la losa.
- Resistencia al agua y la humedad del piso.
- Humedad del piso.
Contáctanos
Este proyecto representa un nuevo hito técnico y operativo, reafirmando nuestro compromiso con la excelencia en pisos industriales para sistemas de automatización que incluye tránsito de vehículos AMR y ACR.
¿Tienes un Proyecto de automatización? Descubre cómo nuestros servicios pueden potenciar la eficiencia de tu centro de distribución o bodega.
https://cogri-gespap.com/contacta/
Por favor comparte esta historia:
- Categorías
